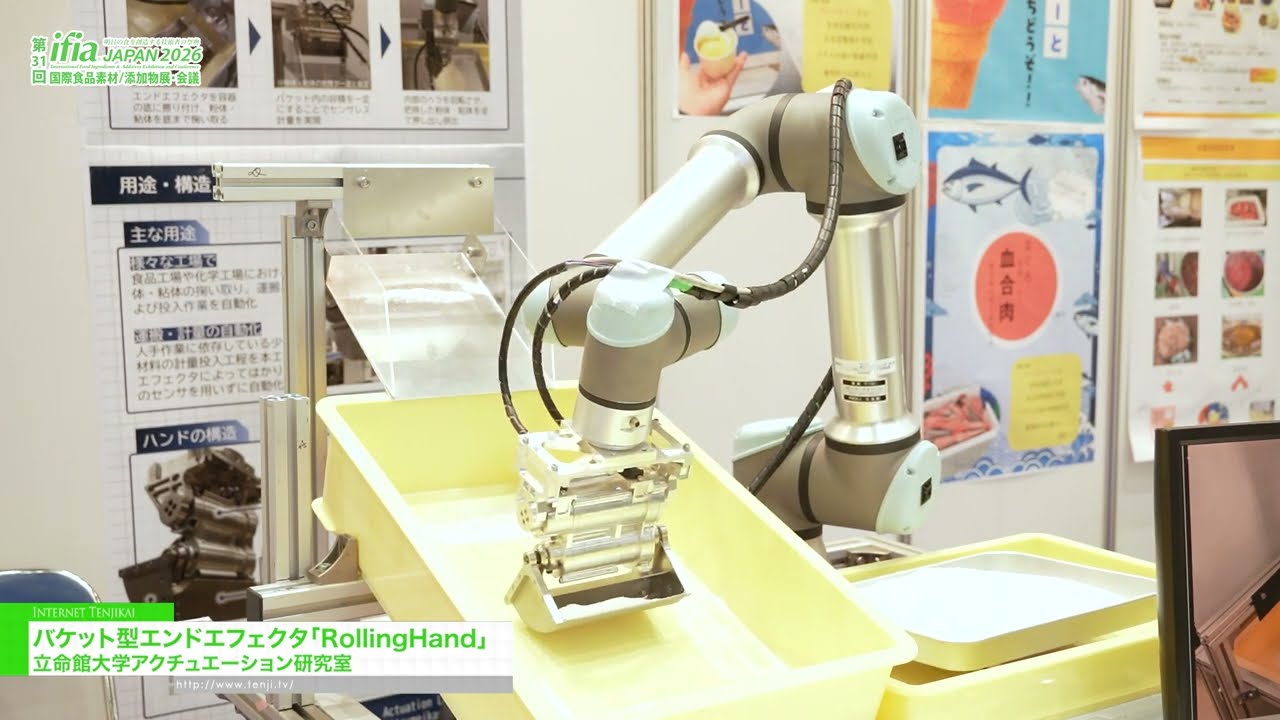
RollingHand, ковшовый концевой захват - Ritsumeikan University Actuation Laboratory [The 31st International Food Ingredients & Additives Exhibition and Conference]
Лаборатория Какогава Университета Рицумейкан разрабатывает роботизированные захватные системы для автоматизации процессов подачи порошкообразных материалов в пищевой и химической промышленности.
На производственных предприятиях операции по дозированию и загрузке порошкообразного сырья по-прежнему во многом выполняются вручную, поэтому снижение трудозатрат и обеспечение стабильной подачи заданного объёма остаются важными задачами.
Лаборатория разработала исполнительный механизм на основе гибкой конструкции Rolling Hand, который способен забирать материал со дна контейнера и быстро захватывать фиксированное количество порошка, повышая эффективность автоматизации пищевых производств.
Решаемые задачи
Решение
FAQ
В чём особенность Rolling Hand?
Для каких задач предназначена данная технология?
Чем она отличается от традиционных методов?
Просмотреть расшифровку видео
Мы представляем лабораторию Какогава Университета Рицумейкан.
Мы разработали исполнительный механизм под названием Rolling Hand — роботизированную руку, предназначенную для захвата фиксированного количества порошкообразных материалов в пищевой промышленности, и хотели бы представить эту технологию.
В настоящее время процессы подачи сырья, особенно порошкообразных материалов в пищевой и химической промышленности, во многом зависят от ручного труда. Поэтому мы стремимся автоматизировать эти операции.
Одной из особенностей системы является способность забирать материал непосредственно со дна контейнера, заполненного порошком.
Традиционные промышленные роботы обычно избегают контакта с объектами, поскольку это считается рискованным. Однако разработанная нами роботизированная рука обладает гибкой конструкцией, что позволяет ей достигать дна контейнера и забирать материал.
Ещё одной особенностью является способность захватывать фиксированное количество материала. Ограничивая объём ковшеобразной конструкции и добавляя движение для выравнивания сверху, мы создали этот исполнительный механизм, вдохновившись тем, как люди используют мерные ложки.
Материал забирается, выравнивается, отмеряется в заданном количестве и затем подаётся в технологическое оборудование.
По сравнению с традиционными системами, использующими весовое оборудование для дозирования, данная технология позволяет выполнять операцию значительно быстрее.
В настоящее время мы сотрудничаем со стартап-компанией, которая использует подобные системы для дозирования сырья перед отгрузкой, и продолжаем разработку технологии с целью её коммерциализации.
Если вас заинтересовала эта технология или исследовательская программа, посетите сайт лаборатории Какогава в составе Actuation Laboratory Университета Рицумейкан, где размещена контактная информация.
Благодарим за внимание.
Связаться с нами